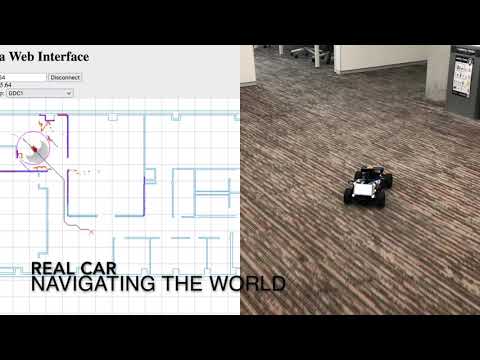
Developed autonomous driving software for a real 1/10-scaled car in C++ on ROS
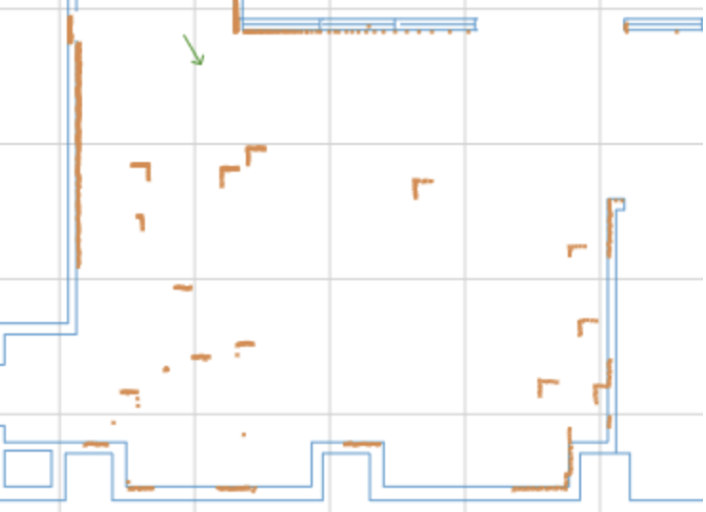
Allowed robots to catogorize its environments from observations and adapt their particle filter parameters online to environmental changes
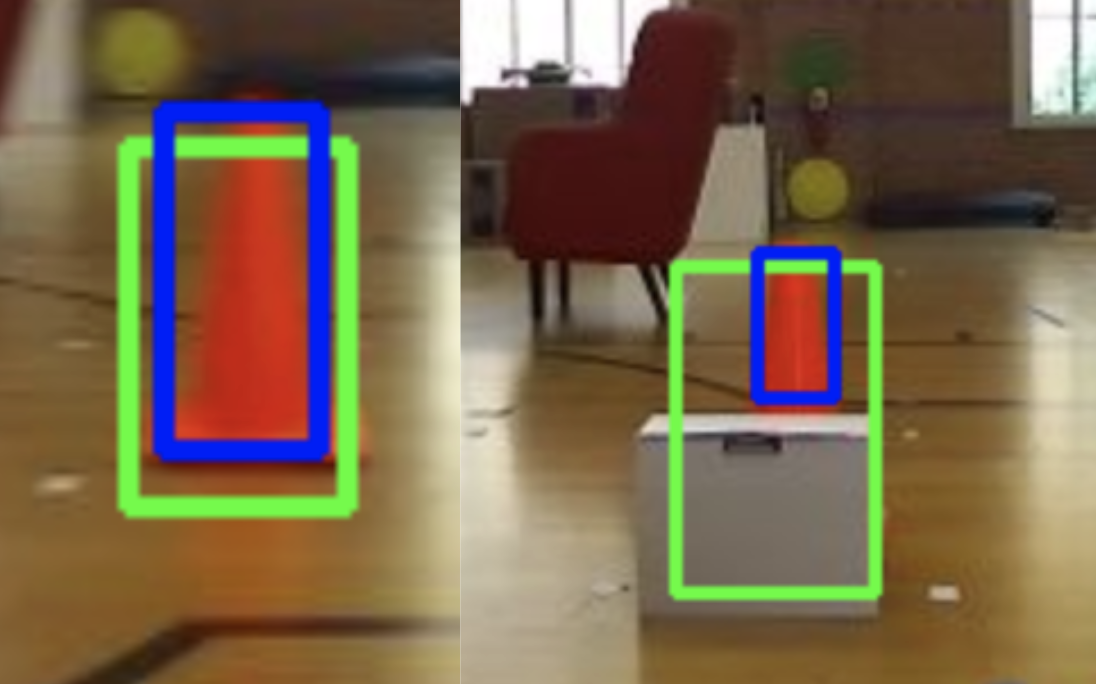
Leveraged SLAM to developed a data collection pipeline to reduce labeling cost and collect consistent labelings under heavy occlusions for object bounding boxes
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
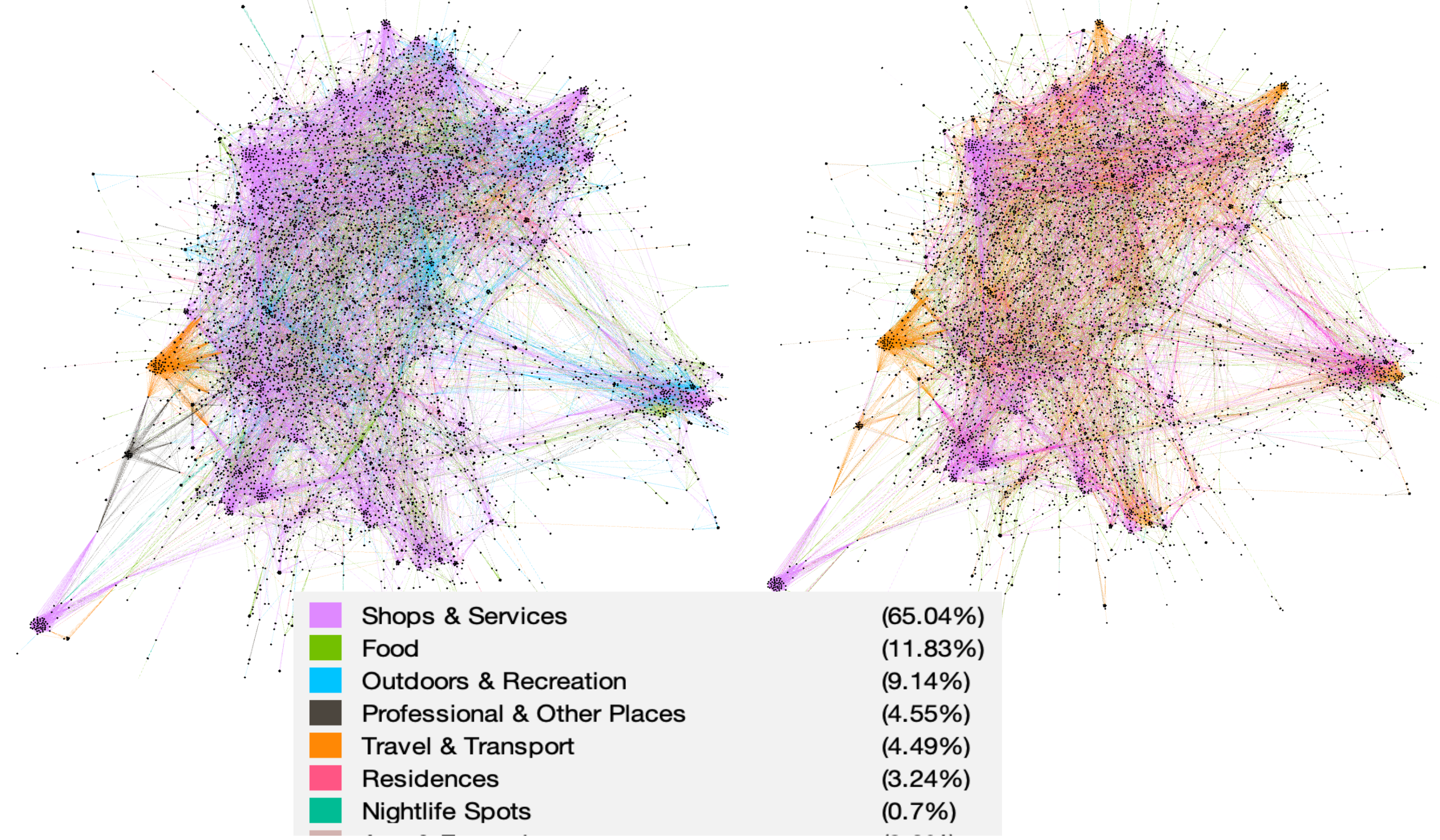
Constructed a city-level human mobility network and simulated the viral transmission of COVID-19 using the SEIR model. We trained a dynamic GNN to access the infectious risk of public venues.
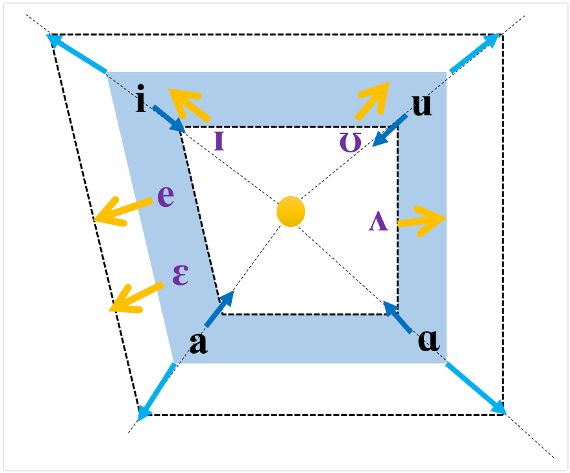
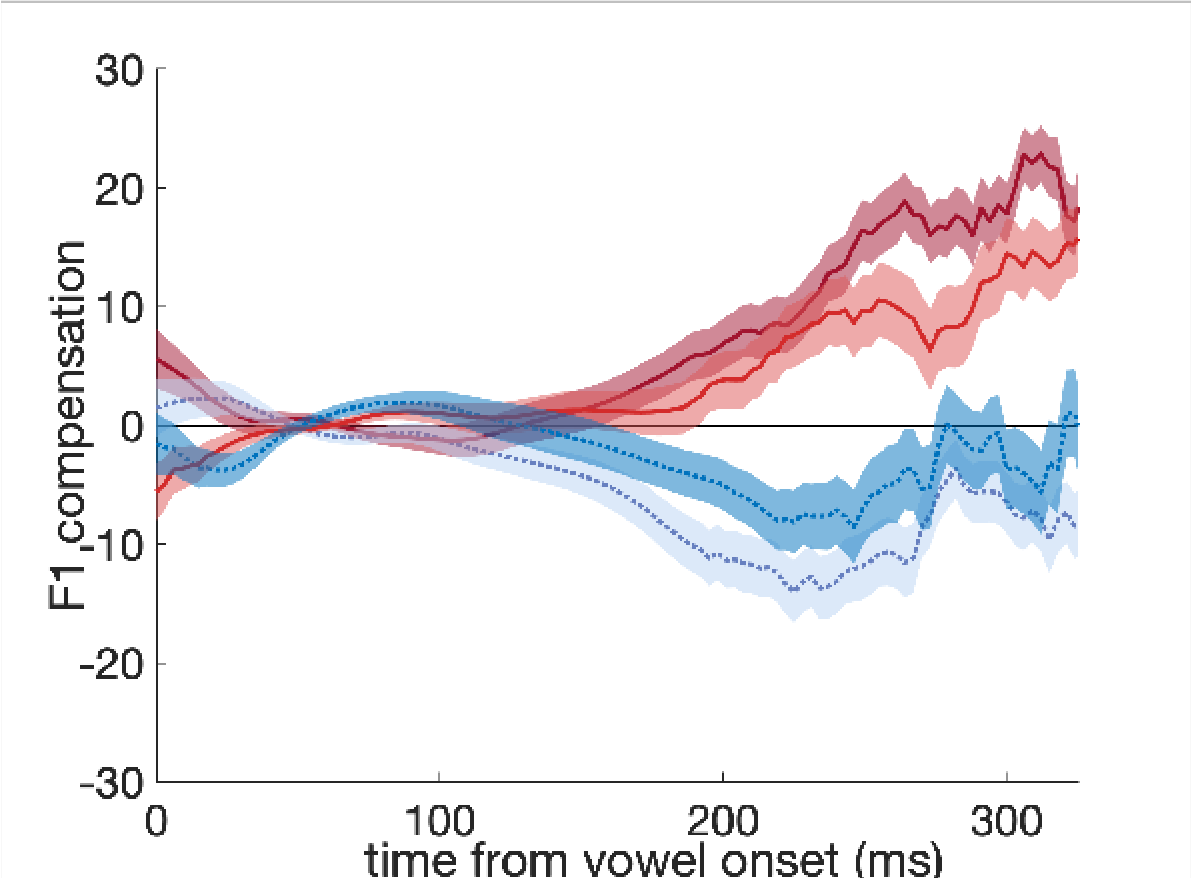
Investigaged on if humans can generalize a more complex pattern from the trained to the untrained vowels on their vowel space
Investigaged on how humans rely on the noise in their auditory feedback to adjust their speech motor control