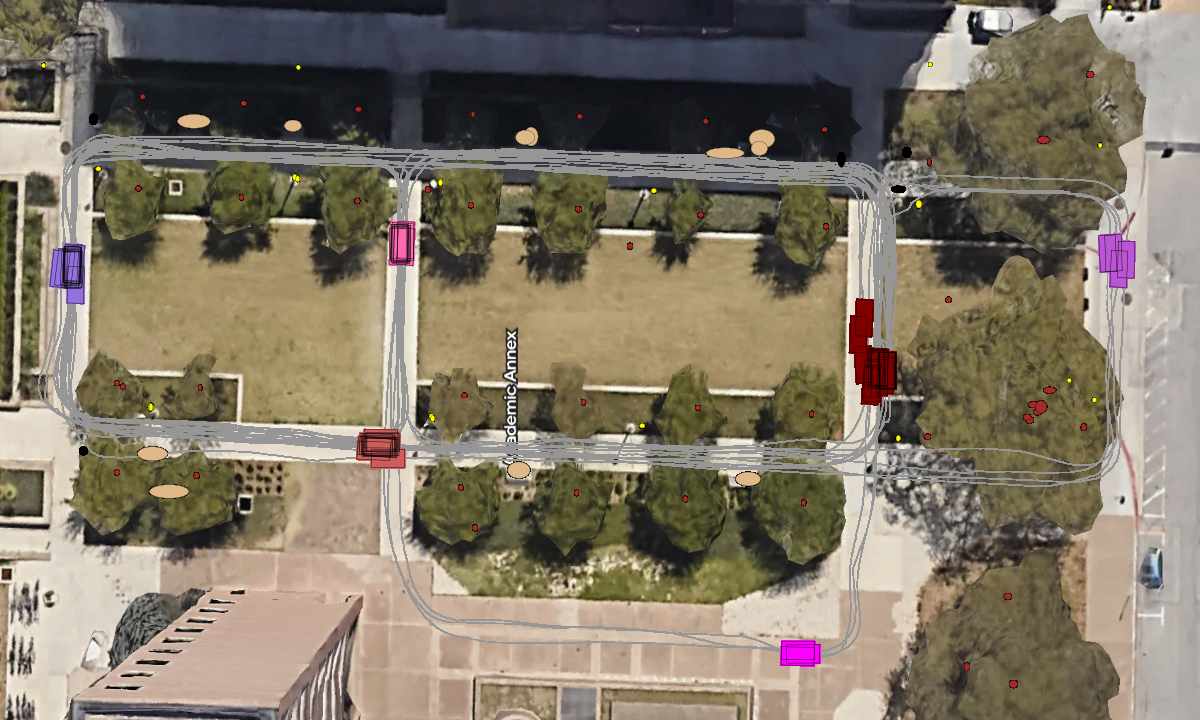
Probabilistic Object Maps for Long-Term Robot Localization
A. Adkins, T. Chen, and J. Biswas | IROS 2022
Introduced probabilistic object maps (POMs) and its localization module for globally consistent localization challenging, highly-dynamic real-world environments such as parking lots